Prosthetic Foot Emulator
.
For people who have lost all or part of a limb, rehabilitation is always a difficult process. For those who have undergone a trans-tibial amputation, their prosthesis must replace the function of the biological limb below the knee. FUTEK collaborated with Humotech to select a sensor for a robotic prosthetic foot that can mimic different devices to help find one that optimizes a person's gait. By mounting our LCM200 miniature load cell in-line with a servo-controlled cable system, Humotech was able to create a closed-loop system that allows patients to test products for better fit and faster rehabilitation.
.
How it works :
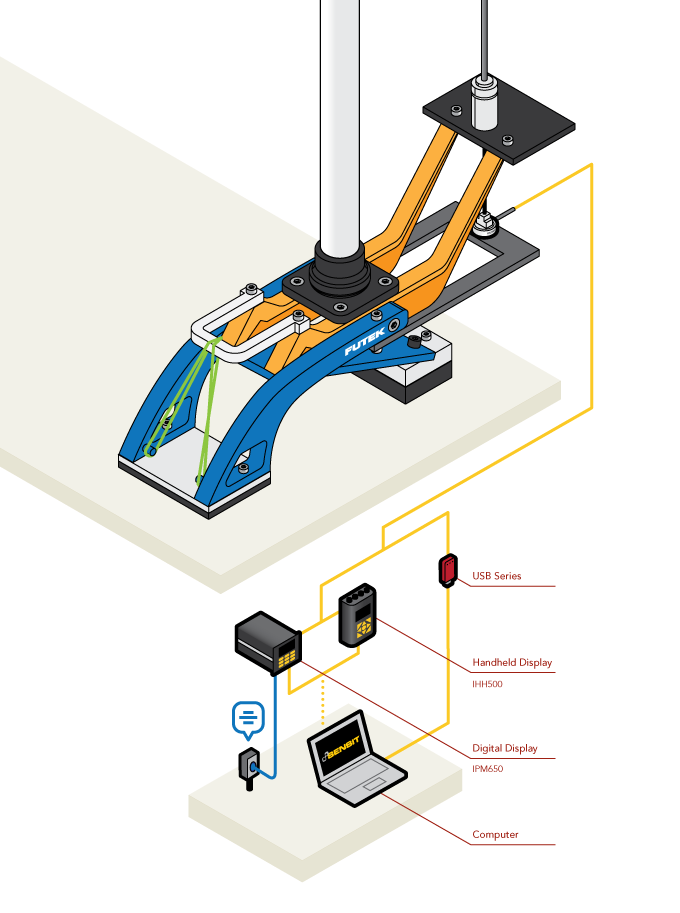
- One end of the LCM200 series miniature tension-compression load cell is attached to the control wire attached to the servo actuator cable.
- The other end of the LCM200 is mounted in the heel of the prosthesis.
- As the individual walks, the cable pulls on the heel of the prosthesis mimicking the torque generated by the Achilles tendon while walking.
- The force used to actuate the heel is measured by the LCM200 sensor and displayed on an IPM650 or IHH500 digital display or directly on a PC using the USB220 high resolution acquisition module and SENSIT software.
- The instruments are then connected to a PC via USB 2.0 directing the servo motor, closing the control loop and allowing the system to adapt to the gait of an individual.
- Using an IDA100 serial amplifier, the output signal can be simultaneously monitored and adjusted on a Windows PC using SENSIT software while delivering a high speed amplified analog output to a PLC/controller.
.
Related products
SM18-GAGE : Strain Gage Signal Conditioning Amplifier with Voltage and Current Output

IHH505: Touchscreen handheld display and logger (usb output)

IPM650: Intelligent Panel Mount - USB Output

PAXS : Digital display for strain gage sensors

FUTEK USB220: External High Resolution/Speed USB Output Kit

LCM525 -- LCM550: Tension and Compression Threaded Rod Load Cell

LCM200: Miniature Tension and Compression Load Cell from +/- 250 Lb, ... , +/- 1000 Lb

LCM300: Tension & Compression Load Cell +/- 50 Lb, ... , +/- 10000 Lb

FUTEK USB320: External USB Kit (Amplified Input)

IAA100 : Strain Gage Signal Conditioning Amplifier with Voltage Output

IAA200 : Strain Gage Signal Conditioning Amplifier with Current Output

LCM100: Miniature Tension and Compression Load Cell from +/- 1000g, ... , +/- 25 Lb

IAA300 : Ultra Low Noise Signal Conditioning Differential Strain Gauge Voltage Amplifier
