Emulateur de pied prothétique
.
Pour les personnes qui ont perdu tout ou partie d'un membre, la rééducation est toujours un processus difficile. Pour ceux qui ont subi une amputation trans-tibiale, leur prothèse doit remplacer la fonction du membre biologique sous le genou. FUTEK a collaboré avec Humotech pour sélectionner un capteur destiné à un pied prothétique robotisé capable d'imiter différents dispositifs pour aider à trouver celui qui optimise la démarche d'une personne. En montant notre cellule de charge miniature LCM200 en ligne avec un système de câble servo-commandé, Humotech a pu créer un système en boucle fermée qui permet aux patients de tester des produits pour un meilleur ajustement et une réhabilitation plus rapide.
.
Fonctionnement :
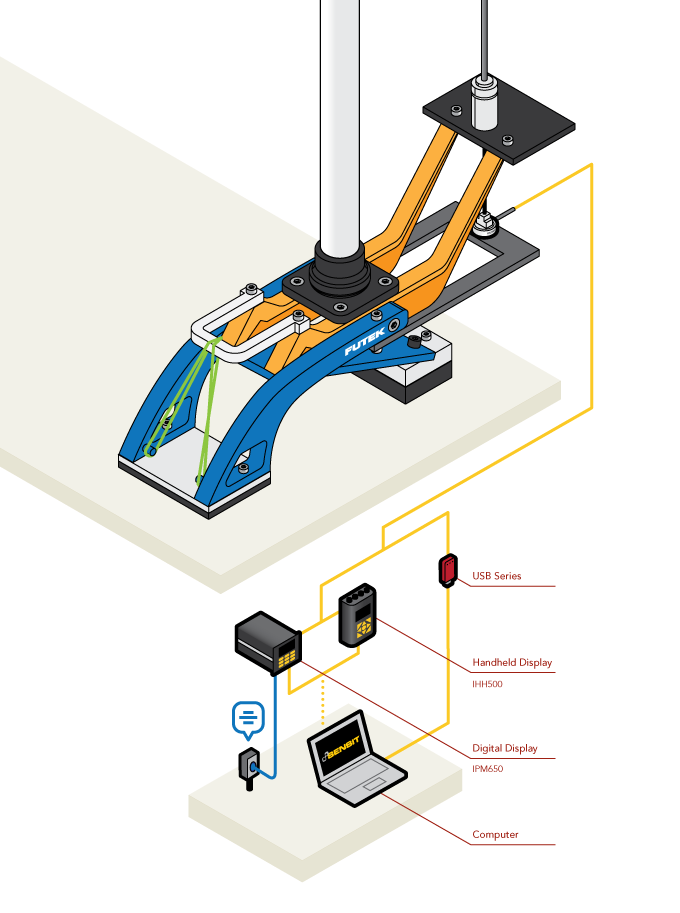
- Une extrémité du capteur de force miniature en traction compression série LCM200 est fixée sur le fil de contrôle attaché au câble actionneur du servomoteur.
- L'autre extrémité du LCM200 est montée dans le talon de la prothèse.
- Lorsque l'individu marche, le câble tire sur le talon de la prothèse imitant le couple généré le tendon d'Achille en marchant.
- La force utilisée pour actionner le talon est mesurée par le capteur LCM200 et affichée sur un afficheur numérique IPM650 ou l'IHH500 ou directement sur un PC à l'aide du module d'acquisition haute résolution USB220 et du logiciel SENSIT.
- Les instruments sont alors connectés à un PC en USB 2.0 dirigeant le servomoteur, ferme la boucle de contrôle et permet au système de s'adapter à la démarche d'un individu.
- En utilisant un amplificateur série IDA100, le signal de sortie peut être surveillé et ajusté simultanément sur un PC Windows à l'aide du logiciel SENSIT tout en délivrant une sortie analogique amplifiée à grande vitesse vers un automate / contrôleur.
Produits associés
SM18-GAGE : Amplificateur conditionneur pour capteurs à jauge de contrainte

IHH505 : Indicateur numérique data logger portatif avec sortie USB

IPM650 : Indicateur numérique pour capteur sortie USB

PAXS : Afficheur pour capteur a jauge de contrainte

Solution FUTEK USB220 pour capteur de force, couple, pression (entrée mV/V)

LCM525 -- LCM550 : Capteur de force en traction compression de 20 000 à 50 000 Lb (de 90 KN à 220 KN)

LCM200 : Capteur de force miniature en traction compression de +/- 250 Lb, ... , +/- 1000 Lb

LCM300 : Capteur de force miniature en traction compression de +/- 50 Lb, ... , +/- 10000 Lb ( de 100 N à 45 KN)

Solution FUTEK USB320 pour capteur à sortie amplifiée courant ou tension

IAA100 : Amplificateur conditionneur sortie tension pour capteur à jauge de contrainte.

IAA200 : Amplificateur Conditionneur sortie courant pour capteur à jauge de contrainte.

LCM100 : Capteur de force miniature en traction compression de +/- 1000g , ... , +/- 25 Lb

IAA300 : Amplificateur pour capteur à jauge - Sortie tension - Haute vitesse et résolution .
