Exoskeleton for Paraplegics
.
Spinal cord injury (SCI) often leaves the patient with little to no chance of ever walking again. The Institute for Human and Machine Cognition (IHMC) sought to help solve this problem with a motorized bionic exoskeleton at the 2016 Cybathlon in Zurich, Switzerland. Their ingenious exoskeleton suit, named Mina v2, uses electric actuators that attach to an individual's legs, moving the hip, knee and ankle joints, allowing an individual to walk without assistance.
Watch this video and learn directly from IHMC experts how FUTEK load cells and amplifiers are used to measure actuator forces in the motorized exoskeleton via a closed-loop control system for precise force control.
.
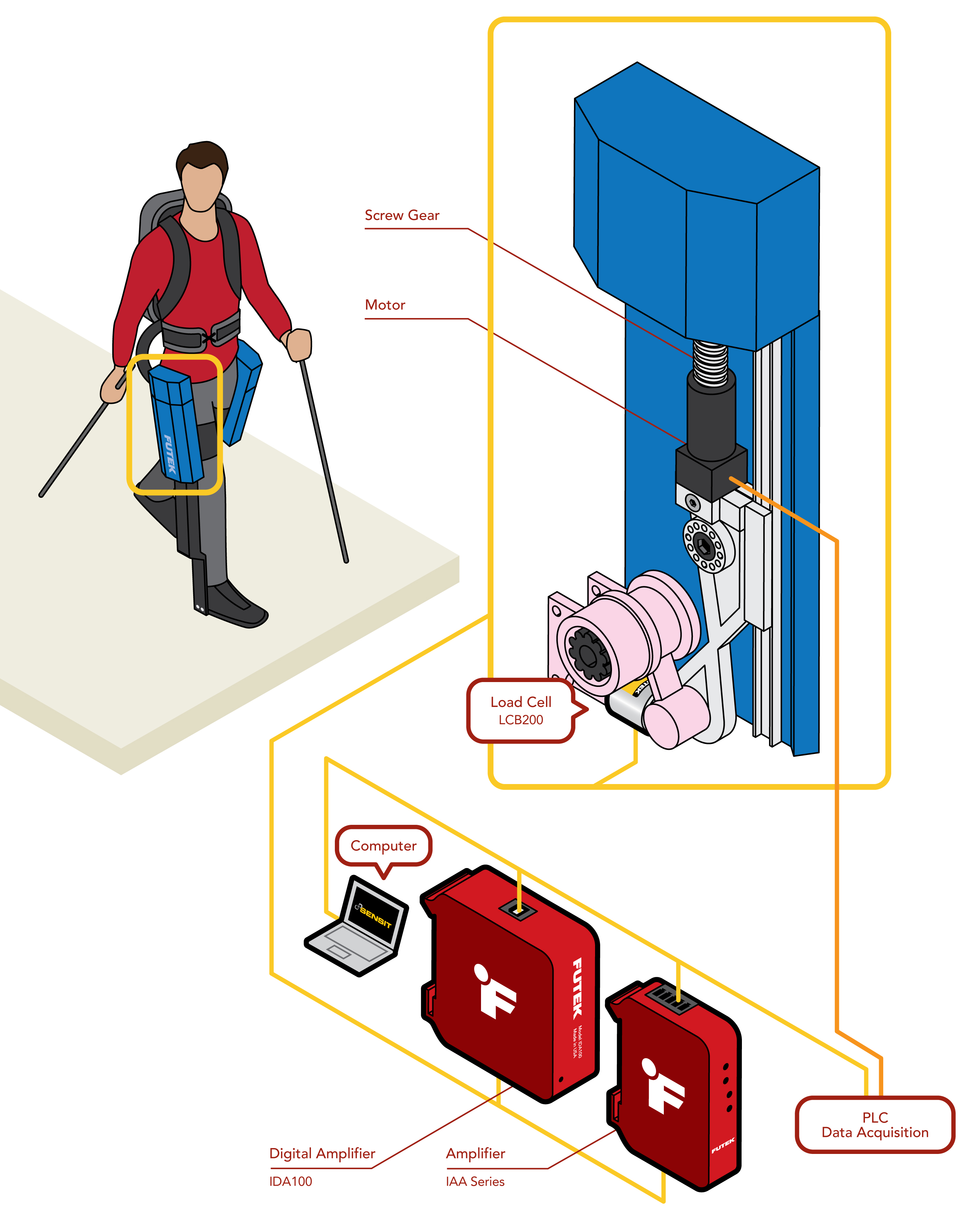
How it works :
- An LCB200 series transducer is mounted on a specialized device attached to the motor, allowing it to rotate like a human joint, minimizing external loads and providing accurate load data.
- As the motor operates, it applies force to the joint, causing it to rotate. This force is measured by the LCB200 miniature load cell.
- The mV/V signal from the LCB200 sensor is sent to the IAA series analog amplifier or the IDA100 series digital amplifier.
- The amplified signal is sent to the exoskeleton control system, using the amplified output of the load cell to close the loop and drive the exoskeleton motors.
- With the IDA100, the amplifier output can be simultaneously monitored and adjusted on a Windows PC with FUTEK's SENSIT software while providing a high-speed amplified analog output.
.
Related products
LSB200 : Miniature S Beam Load Cell +/-10g, ... , 100 Lb

SM18-GAGE : Strain Gage Signal Conditioning Amplifier with Voltage and Current Output

IHH505: Touchscreen handheld display and logger (usb output)

SENSIT: FUTEK Test and Measurement Software

IPM650: Intelligent Panel Mount - USB Output

PAXS : Digital display for strain gage sensors

FUTEK USB220: External High Resolution/Speed USB Output Kit

LCB400: Rod End Tension/Compression Load Cell

LSB210: S-Beam Load Cell Submersible Version

FUTEK USB320: External USB Kit (Amplified Input)

LCB200 : Rod End Tension/Compression Load Cell - From 1000 Lb to 3000 Lb

IAA100 : Strain Gage Signal Conditioning Amplifier with Voltage Output

IAA200 : Strain Gage Signal Conditioning Amplifier with Current Output

IAA300 : Ultra Low Noise Signal Conditioning Differential Strain Gauge Voltage Amplifier

LSB205 : Miniature S Beam Load Cell +/-10g, ... , 100 Lb
