Robotic Spot Welding Force
.
Spot welding robots can dramatically speed up the manufacturing process by automating the welding of complex or hard-to-reach assemblies. The robot must apply the same force to clamp the parts to be welded in order to achieve a strong and complete weld. To ensure this, an LCB400 Rod End load cell is used in-line with the clamp actuator to measure the clamping force during welding.
.
How it works :
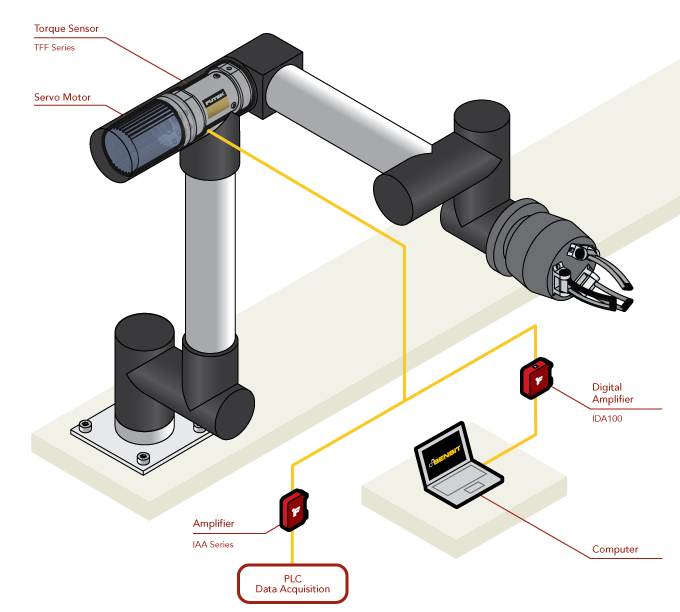
- An LCB400 series load cell is installed in-line with the actuator controlling the spot welding clamps.
- When the actuator closes the gun, the LCB400 measures the force applied to the workpiece.
- The LCB400 measurement is then sent to the IAA or IDA100 series analog amplifiers.
- An amplified analog signal is then sent to the "PLC" controlling the spot welding guns, which allows the control of the clamping force.
- In addition, the SENSIT software can be used to record the sensor output for quality control purposes from the IDA100.
.
Related products
SENSIT: FUTEK Test and Measurement Software

LCB400: Rod End Tension/Compression Load Cell

LCB200 : Rod End Tension/Compression Load Cell - From 1000 Lb to 3000 Lb

IAA100 : Strain Gage Signal Conditioning Amplifier with Voltage Output

IAA200 : Strain Gage Signal Conditioning Amplifier with Current Output

LCB500 : Tension and Compression Load Cell - From +/- 100 to +/- 5000 Lb

IAA300 : Ultra Low Noise Signal Conditioning Differential Strain Gauge Voltage Amplifier
