Steering Torque Sensor
.
What is Steer-by-Wire technology ?
Traditionally, conventional and off-road vehicles have used a hydromechanical system for steering. The mechanical system typically consisted of a rack-and-pinion steering mechanism physically connected to the steering wheel.
In the 1980s and 1990s, power steering became popular and reduced the force required to turn the steering wheel. This was done by using a hydraulic actuator to help turn the steering rack. Even with electric power steering, the biggest challenge is the limitations of mechanical components.
Steer-by-Wire (SbW) or Drive-by-Wire (DbW) technology in the automotive industry involves using electronics, actuators and algorithms to replace the hydraulic and mechanical connections between the steering wheel and the road. This technology replaces traditional mechanical control systems with electronic control systems and the concept is very similar to fly-by-wire control systems widely used in the aviation industry.
.
How are steering torque sensors used in SbW systems ?
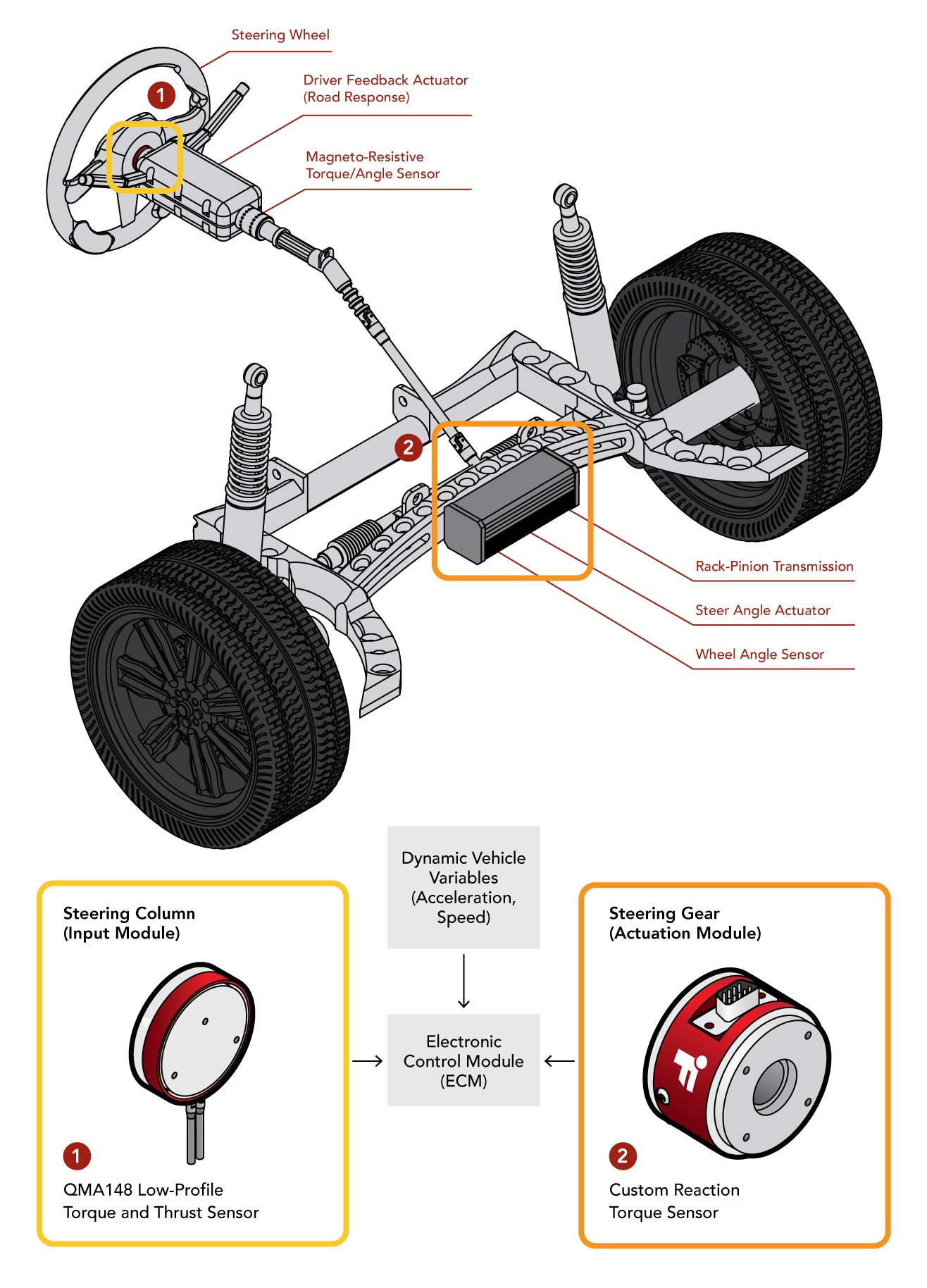
Reaction and multi-axis torque sensors are used heavily in the Steer-by-Wire test environment to validate the control system design. Torque and multi-axis sensors are installed in the flywheel (input module) and rack-and-pinion transmission (actuation module) during the verification and validation phase to audit and calibrate the Steer-by-Wire control system (control loop parameters, actuator dynamics). Steer-by-Wire systems must be validated during the product design phase and require extreme verification before being deployed on the final commercial product.
Automotive design engineers can take advantage of FUTEK's high-accuracy multi-axis torque sensor to audit and validate new Steer-by-Wire system designs and calibrate feedback control systems.
.
How does it work ?
- Steering Wheel / Column : During the product validation phase, the QMA148 Low Profile Torque and Thrust Sensor provides QA and controls engineers with the proper tools to measure the torque applied to steering controls. This multi-axis torque sensor can also be used to monitor the pull and push of the driver's hands on the steering wheel as they accelerate and decelerate and/or the measurement of frontal impact force on crash test dummies. FUTEK's QMA148 Low Profile Torque and Thrust Sensor is installed between the steering wheel and steering column.
- Steering gear actuation module : During product design validation, testing engineers must measure the actuation torque applied to the rack and pinion transmission (actuation module). This allows for proper calibration of the torque control loop. FUTEK's custom reaction torque sensors can be installed with the steering angle actuator to measure the actual actuation torque being exerted and correctly calibrate the actuation module with additional torque feedback.
.
.
Products used :
- QMA148 Low profile biaxial torque and thrust sensor;
- TFF OEM flange to flange reaction torque sensor;
All these sensors can be combined with the USB220 digital signal conditioner.
Related products
QMA148: Custom Low Profile Torque & Thrust Sensor

TFF325: Reaction Torque Sensor - 0.15 ... 12 Nm

TFF400 : Miniature reaction torque sensor from 0.04 Nm to 60 Nm

TFF425 -- TFF750: Reaction Torque Sensor with Flanges - 0.04 Nm ... 33900 Nm

FUTEK USB220: External High Resolution/Speed USB Output Kit
