De quels capteurs disposent les robots humanoïdes ?
De quels capteurs disposent les robots humanoïdes ?
Les robots humanoïdes progressent rapidement pour assister et soutenir les activités humaines, ouvrant la voie à des avancées technologiques significatives qui ouvrent une large gamme d'applications dans un large éventail de secteurs allant de l'assistance aux tâches cliniques et au soutien aux patients, jusqu'à l'automatisation de tâches répétitives et potentiellement dangereuses pour diverses applications qui augmentent l'efficacité des opérations industrielles. Au cœur de ces progrès se trouve l'intégration de capteurs de force et de couple qui utilisent la technologie des jauges de contrainte qui permet aux robots de se déplacer avec une grâce humaine, avec précision et exactitude. La collaboration entre les ingénieurs, les concepteurs et les fabricants de capteurs est essentielle pour surmonter les défis tels que la gestion de la complexité de l'intégration, l'adaptation à la variabilité de l'environnement, la réactivité dynamique, la rentabilité, la minimisation de la diaphonie mécanique, la garantie de la durabilité et le respect des normes de sécurité.
Notre équipe d'ingénieurs possède une expertise approfondie dans la conception et la personnalisation de capteurs de force et de couple pour surmonter et relever les défis des innovations en matière de robots humanoïdes. Découvrez comment notre expertise en matière de capteurs de force et de couple est utilisée dans les principaux systèmes robotiques humanoïdes.
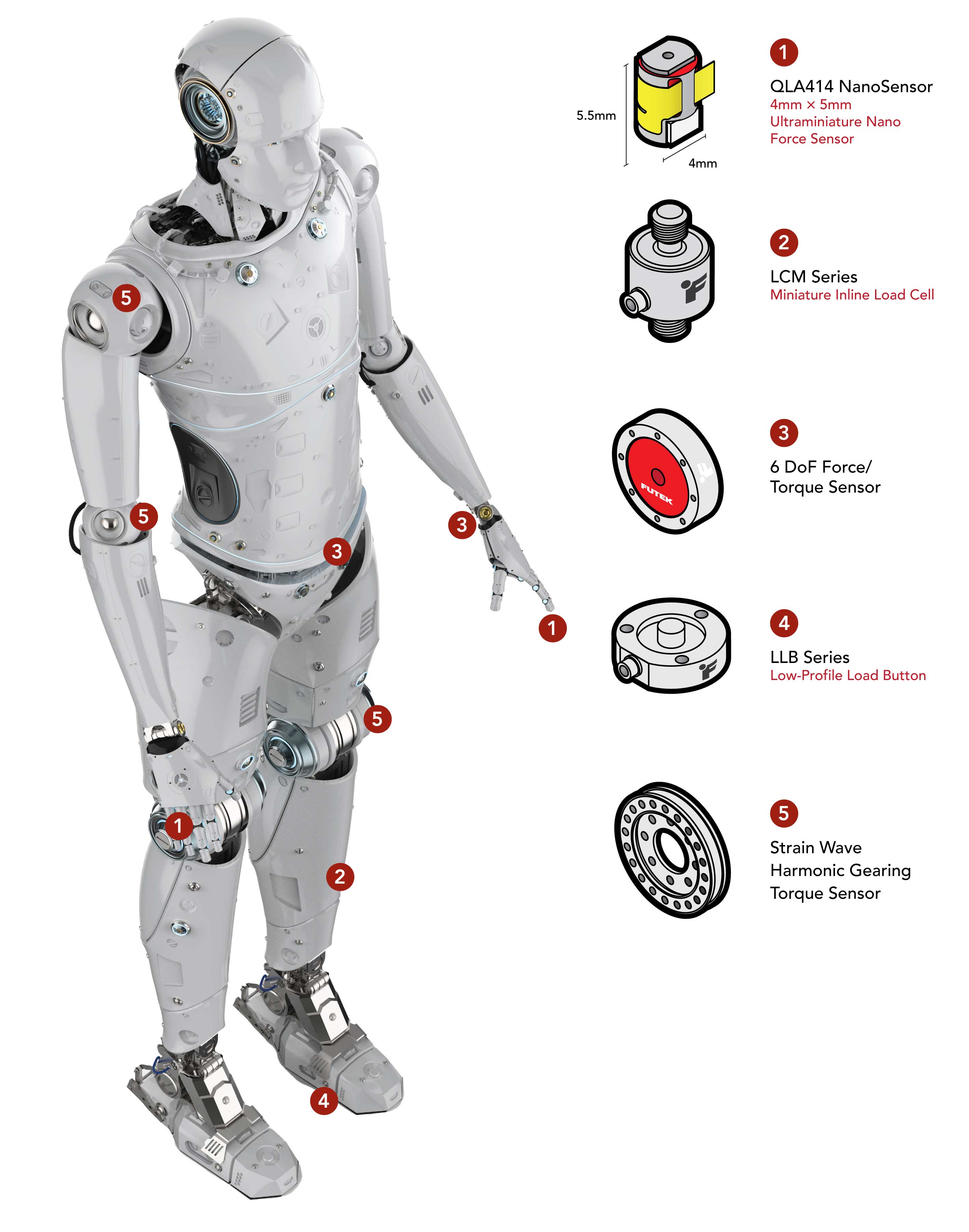
1) Capteur nano QLA414/QLA424 – Bout des doigts, articulations des doigts alignées
Les systèmes de doigts et de articulations des doigts en ligne sur les robots humanoïdes effectuent des tâches qui nécessitent une manipulation délicate ou une interaction avec l'environnement. Les capteurs de force QLA414/424 Nano présentent une conception à trou traversant, qui se monte sur un arbre comme une structure monolithique, en plus des dispositions de montage frontales qui lui permettent de mesurer à la fois la tension et la compression, une percée industrielle pour un capteur aussi petit que 4 mm x 5 mm et ne pesant que 0,5 g, surmontant les défis de la complexité de l'intégration avec le matériel robotique et les systèmes de contrôle existants tout en conservant une conception compacte et légère. De plus, la conception du capteur Nano offre une fréquence naturelle élevée inégalée de 98 kHz, offrant une réponse ultra-rapide (30 à 40 fois plus rapide que les solutions plus grandes/comparables). Les capteurs de force Nano sont également une option appropriée pour les applications de détection tactile robotique .
2) Capteur de force miniature série LCM – Tension/compression du tibia
Le système tibial d'un robot humanoïde comprend des capteurs placés dans le tibia du robot (la partie inférieure de la jambe) qui mesurent la force exercée sur la jambe lorsque le robot se déplace, se tient debout ou interagit avec l'environnement, et dans quelle direction. Les cellules de charge de la série LCM sont une excellente solution pour surmonter ces défis en raison de leur capacité à mesurer les charges de tension et de compression dans les applications d'endurance, de presse et en ligne qui nécessitent un capteur très précis avec un faible encombrement. Le corps en acier inoxydable offre une résistance et une résistance à la corrosion exceptionnelles et offre une protection améliorée contre les dommages physiques en plus de résister à d'autres conditions environnementales difficiles. Certains modèles peuvent être commandés avec un indice de protection IP67 qui peut résister à une immersion dans un mètre d'eau pendant au moins 30 minutes. Cette caractéristique rend le capteur « résistant aux intempéries » ou « résistant à l'extérieur » et ouvre les possibilités d'application car il permettra une utilisation en extérieur dans des conditions humides, pluvieuses ou très humides.
Certaines applications de mesure de force en ligne peuvent nécessiter une cellule de charge LCB200 conçue pour les applications impliquant des actionneurs en ligne ou des vérins hydrauliques avec filetage mâle/femelle. Le principal avantage du LCB200 est qu'il dispose d'un filetage mâle/femelle qui peut étendre un actionneur avec moins d'adaptateurs et de composants nécessaires.
3) Capteur F/T 6 DoF – Poignets, articulation de liaison du torse au bas du corps
Les capteurs dans les articulations du torse des robots humanoïdes rendent les mouvements fluides comme la torsion, la flexion et la rotation, garantissant que le robot peut gérer son propre poids et les forces qu'il rencontre pendant le mouvement. Les systèmes de poignet sur un robot humanoïde augmentent la dextérité et la portée de fonctionnement pour différentes tâches optimisées requises. Les capteurs F/T à 6 degrés de liberté sont conçus pour mesurer avec précision les forces et les couples appliqués dans une direction avec peu ou pas d'interférences croisées provenant de la force ou des moments appliqués dans d'autres directions. Cette fonctionnalité est particulièrement importante pour atteindre le niveau de précision et de dextérité requis pour différentes tâches d'opération exécutées avec le système bras-torse.
Avantages du capteur de force/couple FUTEK 6 DoF :
- Léger et discret ;
- Trou traversant pour l'alimentation des câbles et de l'air si applicable ;
- Electronique embarquée haute résolution rendant le capteur 6 DOF modulaire ;
- Flexibilité de conception du client pour répondre à certaines exigences de rigidité, de poids, de protection contre les surcharges ou de géométrie ;
- Personnalisable pour la redondance et la détection des pannes ;
- Personnalisable pour une faible consommation d'énergie ;
- Matrice de compensation pour minimiser la diaphonie ;
- Stabilité élevée du zéro et de la température.
4) Capteur de type bouton de la série LLB – Bas du pied
Le système de pied des robots humanoïdes, équipé de cellules de charge et de capteurs de force intégrés, supporte non seulement le poids du robot, mais détecte également les forces externes exercées sur le sol. Ce retour de force fournit des informations essentielles sur la posture du pied et les forces externes, permettant une mesure précise du centre de gravité du robot et améliorant son autonomie. En évaluant avec précision ces forces, le robot peut maintenir l'équilibre et s'adapter à des conditions variables, maximisant ainsi son indépendance opérationnelle. Le bouton de charge miniature à profil bas de la série LLB est capable de mesurer les forces de compression avec un faible encombrement. La série LLB comprend un élément de contrainte hautement personnalisé conçu pour permettre une mesure plus poussée de la contrainte autour de l'élément de capteur actif, ce qui réduit les erreurs de reproductibilité des charges hors axe, ainsi qu'un équilibrage du zéro et une compensation thermique intégrés en interne, permettant une fiabilité, une précision et des performances exceptionnelles du capteur. Il offre une fréquence naturelle remarquablement élevée qui offre un temps de réponse rapide qui bénéficie de la précision et de la réduction du temps de cycle dans les applications dynamiques telles que la plante du pied dans les robots humanoïdes.
5) Capteur de couple à engrenage et à ondes de contrainte - Épaules, genou, coude
Monté entre les épaules, les genoux et les coudes du robot et les points de montage, le capteur de couple à engrenages à ondes de contrainte mesure le couple de sortie pendant le mouvement sur chaque articulation. Les avantages dans les applications humanoïdes sont les suivants :
- Réduit l'inertie du bras du robot et améliore les performances dynamiques grâce à une accélération plus rapide et un temps de stabilisation plus rapide ;
- Offre des rapports de réduction élevés en une seule étape et un jeu très faible ;
- Augmente la capacité de charge utile et réduit les besoins énergétiques ;
- Capacités légères, discrètes et de haute précision pour une rétroaction en boucle fermée ;
- Grande flexibilité dans la géométrie et la conception.
Produits associés
QLA414: Nano Capteur de force en traction compression

LCM100 : Capteur de force miniature en traction compression de +/- 1000g , ... , +/- 25 Lb

LCM200 : Capteur de force miniature en traction compression de +/- 250 Lb, ... , +/- 1000 Lb

LCM300 : Capteur de force miniature en traction compression de +/- 50 Lb, ... , +/- 10000 Lb ( de 100 N à 45 KN)

LCM525 -- LCM550 : Capteur de force en traction compression de 20 000 à 50 000 Lb (de 90 KN à 220 KN)

LLB300 : Capteur de force miniature en compression - 25 Lb à 1000 Lb (de 100 N à 4 KN)

LLB350 : Capteur de force miniature en compression - 0...25, 50 Lb (de 0 à 100, 220 N)

LLB130 : Capteur de force miniature en compression - 5Lb ...50Lb (de 20 N à 200 N)

LLB210 : Capteur de force miniature en compression - 10 ... 50 Lb (de 40 N à 200 N)

LLB215: Capteur de force miniature en compression - 10 ... 50 Lb (de 40 N à 200 N)

LLB250 : Capteur de force miniature en compression - 100 Lb ... 250 Lb (de 450 N à 1 KN)

LLB250 : Capteur de force miniature en compression - 100 Lb ... 250 Lb (de 450 N à 1 KN)

LLB400 : Capteur de force miniature en compression - 100 Lb ... 2500 Lb (de 450 N à 10 KN)

LLB450 : Capteur de force miniature en compression haute capacité - 5000 Lb ... 10000 Lb (de 22 KN à 45 KN)

LLB500 : Capteur de force type bouton en compression de 15000 à 50000 Lb (de 66 KN à 220 KN)

LCB200 : Capteur de force en traction compression - De 1000 Lb à 3000 Lb (de 4 KN à 13 KN)
