Mesure de force et pression tactile
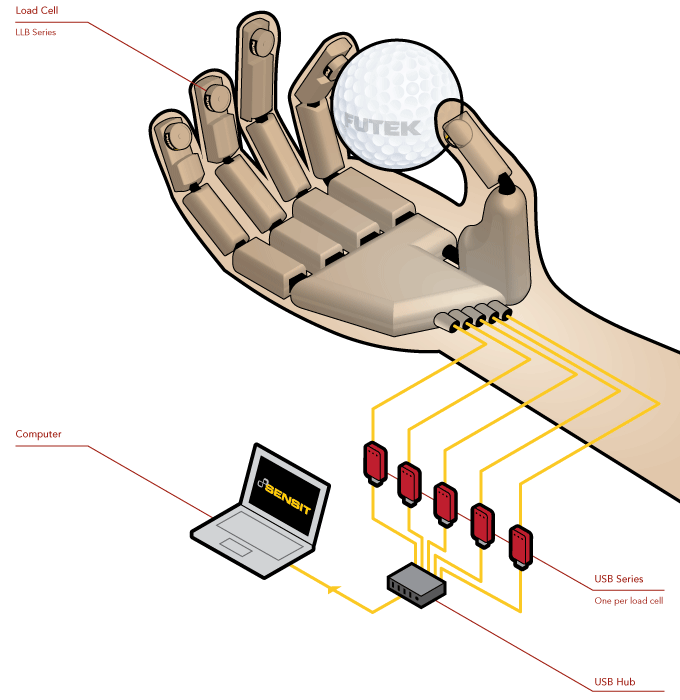
Des cellules de charge à boutons multiples sont utilisées pour mesurer la force tactile produite par un robot industriel.
Fonctionnement :
- Les recherches en robotique nécessitent l’utilisation d’outils de mesure de haute précision.
- Dans cette application, 5 capteurs de force miniatures ont été placé sur le bout de chaque doigt robotisé. Lorsque la main robotisée manipule différents objets, la force appliquée est collectée.
- Les capteurs de force miniature série LLB130 sont couplés à des systèmes d'acquisition USB210, afin de transférer directement les données sur un PC. Le logiciel d’acquisition SENSIT permet alors d’acquérir et d’analyse des données.
Produits associés
IHH505 : Indicateur numérique data logger portatif avec sortie USB

SENSIT : Logiciel d'acquisition des données FUTEK

IPM650 : Indicateur numérique pour capteur sortie USB

PAXS : Afficheur pour capteur a jauge de contrainte

Solution FUTEK USB220 pour capteur de force, couple, pression (entrée mV/V)

LLB500 : Capteur de force type bouton en compression de 15000 à 50000 Lb (de 66 KN à 220 KN)

LLB130 : Capteur de force miniature en compression - 5Lb ...50Lb (de 20 N à 200 N)

LLB250 : Capteur de force miniature en compression - 100 Lb ... 250 Lb (de 450 N à 1 KN)

LLB300 : Capteur de force miniature en compression - 25 Lb à 1000 Lb (de 100 N à 4 KN)

LLB350 : Capteur de force miniature en compression - 0...25, 50 Lb (de 0 à 100, 220 N)

LLB400 : Capteur de force miniature en compression - 100 Lb ... 2500 Lb (de 450 N à 10 KN)

LLB450 : Capteur de force miniature en compression haute capacité - 5000 Lb ... 10000 Lb (de 22 KN à 45 KN)

LLB210 : Capteur de force miniature en compression - 10 ... 50 Lb (de 40 N à 200 N)

SM1182 : Capteur de force en compression de 0 à 300 Kg, ..., 20 Tonnes

Solution FUTEK USB320 pour capteur à sortie amplifiée courant ou tension

Solution FUTEK USB520 pour capteur de couple avec codeur incorporé - mesure de couple et angle / vitesse

SM-C2S : Capteur de force en compression de 0 à 100 Kg, ..., 200 Tonnes

SM-C2SAM : Capteur de force en compression de 0 à 100 Kg, ..., 200 Tonnes - sortie amplifiée
