Calibration de matériel de chirurgie laparoscopique
.
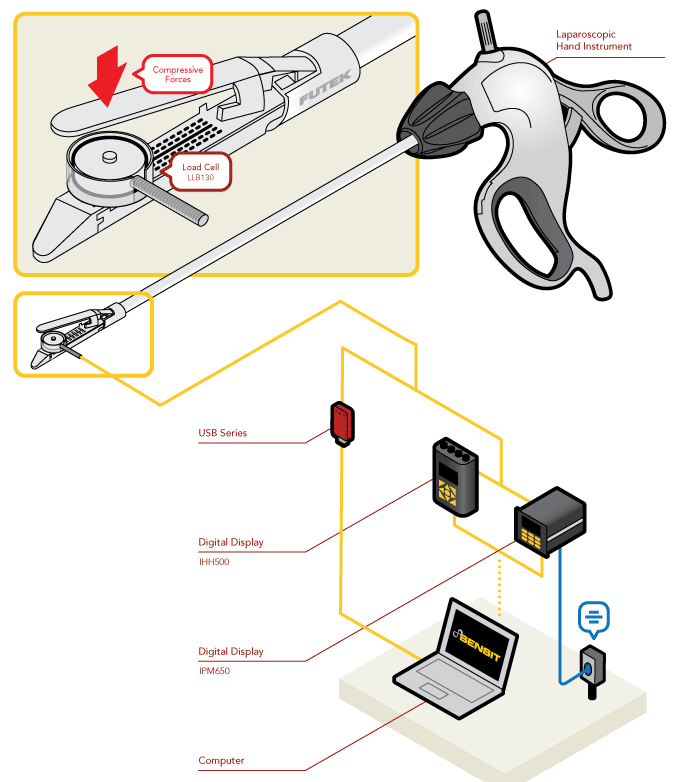
La chirurgie mini-invasive (MIS) et la chirurgie à accès unique (SPAS) ont considérablement réduit les risques et le temps de récupération des patients pour l'extraction de tumeurs, la réparation de valves cardiaques et d'artères, et la fécondation in vitro. Qu'elle soit réalisée à l'aide d'un système chirurgical robotisé ou par les mains expertes d'un chirurgien, l'instrumentation de précision est nécessaire pour travailler avec les tissus délicats du patient tout en assurant une prise précise et sûre sans exercer de force excessive. Les forces appliquées par l'instrumentation robotique doivent être calibrées pour que les mécanismes de retour visuel et haptique signalent les forces appliquées correctement pendant la chirurgie. L'instrumentation manuelle nécessite une vérification des forces appliquées afin que les sensations tactiles ressenties par le chirurgien soient cohérentes et prévisibles. Nous démontrons ici la vérification et l'étalonnage des mâchoires d'un instrument laparoscopique.
.
Fonctionnement :
- Les chirurgiens travaillent sur des tissus extremement sensibles, cela exigent l'utilisation d'instruments de qualité, disposant d'une force de préhension rigoureusement calibré.
- Les capteurs de force permettent de vérifier le niveau de force des outils avant intervention chirurgicale.
- Dans cette application, le Capteur de force miniature série LLB130 est placé directement dans la pince de préhension.
- Les mesures peuvent être visualisées sur un afficheur numérique IHH500 (portatif sur batterie) ou l’IPM650 puis envoyées par USB vers un PC. Ces données sont ensuite analysées afin de déterminer si l’outil est prêt pour l'intervention ou s’il necessite un réglage.
Produits associés
SM18-GAGE : Amplificateur conditionneur pour capteurs à jauge de contrainte

IHH505 : Indicateur numérique data logger portatif avec sortie USB

SENSIT : Logiciel d'acquisition des données FUTEK

IPM650 : Indicateur numérique pour capteur sortie USB

PAXS : Afficheur pour capteur a jauge de contrainte

Solution FUTEK USB220 pour capteur de force, couple, pression (entrée mV/V)

LLB500 : Capteur de force type bouton en compression de 15000 à 50000 Lb (de 66 KN à 220 KN)

LLB130 : Capteur de force miniature en compression - 5Lb ...50Lb (de 20 N à 200 N)

LLB250 : Capteur de force miniature en compression - 100 Lb ... 250 Lb (de 450 N à 1 KN)

LLB300 : Capteur de force miniature en compression - 25 Lb à 1000 Lb (de 100 N à 4 KN)

LLB350 : Capteur de force miniature en compression - 0...25, 50 Lb (de 0 à 100, 220 N)

LLB400 : Capteur de force miniature en compression - 100 Lb ... 2500 Lb (de 450 N à 10 KN)

LLB450 : Capteur de force miniature en compression haute capacité - 5000 Lb ... 10000 Lb (de 22 KN à 45 KN)

LLB210 : Capteur de force miniature en compression - 10 ... 50 Lb (de 40 N à 200 N)

Solution FUTEK USB320 pour capteur à sortie amplifiée courant ou tension

Solution FUTEK USB520 pour capteur de couple avec codeur incorporé - mesure de couple et angle / vitesse

IAA100 : Amplificateur conditionneur sortie tension pour capteur à jauge de contrainte.
