Actionneur linéaire avec capteur de force
Contrôle de la force de l'actionneur électrique
Dans les applications industrielles qui impliquent des actionneurs linéaires, il est important de mesurer et de contrôler la force appliquée par l'actionneur (par exemple, un actionneur linéaire à force contrôlée). Les méthodes les plus courantes pour réaliser un contrôle de la force sont l'utilisation en boucle ouverte ou en boucle fermée.
Actionneurs linéaires à boucle ouverte
Un système d'actionneur électrique de commande de force en boucle ouverte peut être réalisé en mesurant et en contrôlant la tension ou le courant envoyé au servomoteur rotatif de l'actionneur. Cette approche en boucle ouverte entraîne une erreur de 20 % dans la mesure de la force car il existe des interférences externes inhérentes qui ne sont pas capturées par les mesures de tension et de courant, telles que le frottement de l'actionneur ou des facteurs externes.
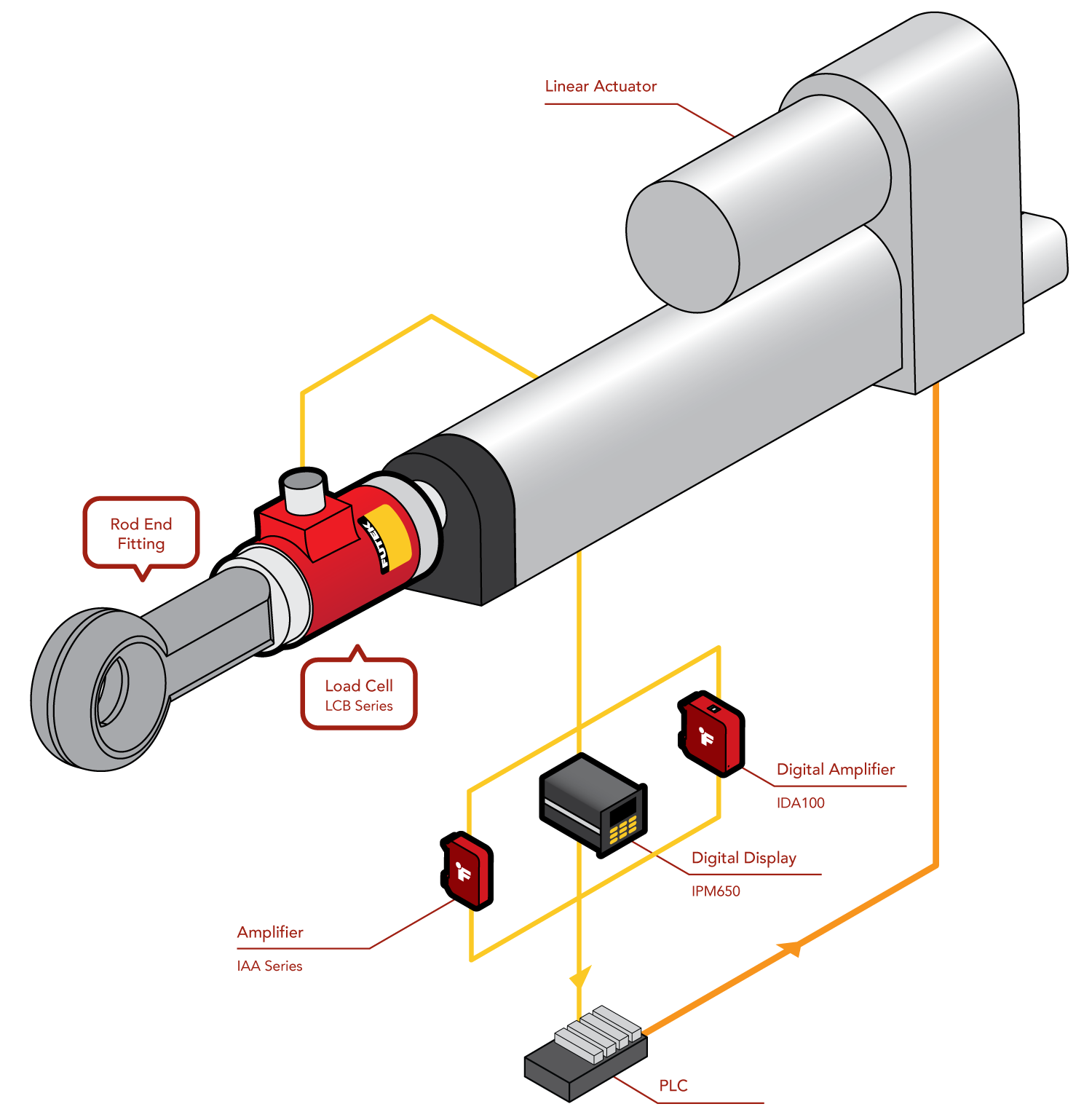
Contrôle de la force de l'actionneur linéaire en boucle fermée à l'aide d'un capteur de force
Étant donné qu'une plus grande précision est requise pour la force de poussée/traction de l'actionneur linéaire, plusieurs applications nécessitent l'installation d'un capteur de force en ligne avec l'actionneur linéaire. La cellule de charge peut être placée à l'extérieur ou à l'intérieur de l'actionneur. Cette approche fournit une précision de contrôle du retour de force de 1 % ou plus.
Pourquoi la série LCB est-elle adaptée dans ce cas ?
La série LCB comprend des modèles de capteurs de force à extrémité de tige (tension/compression) conçus pour les applications impliquant des actionneurs en ligne ou des vérins hydrauliques avec filetage mâle/femelle. Le modèle standard de capteur de force pour actionneur de la série LCB (tension/compression) possède des filetages mâle/femelle, sa structure est réalisée en aluminium 2024 pour les basses capacités, et en acier inoxydable 17-4 plus robuste pour les capacités supérieures.
La série LCB s'adapte parfaitement aux exigences de capacité moyenne à élevée (1 000 lb à 20 000 lb).
Caractéristiques de la série LCB
- Précision de mesure de ±0,5 % de la sortie nominale
- Répétabilité de ±0,1 % de la sortie nominale
- Léger (le modèle LCB200 ne pèse que 99 grammes)
- Mesure de traction et de compression
- Faible dérive de température
- Pour des mesures dynamiques ou statiques
- Le montage simple permet un filetage en ligne facile dans une tige filetée ou un actionneur
Fonctionnement:
- L'extrémité fixe d'un capteur de force de la série LCB est montée à l'extrémité d'un actionneur linéaire.
- L'extrémité active du capteur de force est alors attachée à la charge.
- Le capteur de force LCB mesure la force appliquée à la charge par l'actionneur.
- La mesure est envoyée à l'afficheur numérique (IHH500, IPM650) ou affichée sur un PC avec le logiciel SENSIT (IDA100).
- Un signal analogique amplifié est ensuite envoyé à l'automate, permettant le contrôle de la force de l'actionneur linéaire.
- De plus, notre logiciel SENSIT peut être utilisé pour enregistrer la sortie du capteur pour nos IPM650 et IDA100.
Produits associés
LCB200 : Capteur de force en traction compression - De 1000 Lb à 3000 Lb (de 4 KN à 13 KN)

LCB400 : Capteur de force en traction compression - +/-1000 Lb ... 10000 Lb (de 4500 N à 44 KN)

LCB500 : Capteur de Force en Traction Compression - De +/- 100 Lb à +/- 5000 Lb (de 400 N à 20 KN)

IPM650 : Indicateur numérique pour capteur sortie USB

SENSIT : Logiciel d'acquisition des données FUTEK
