Mesure de la force de préhension d'un robot
Pourquoi est-il important de contrôler la force de préhension d'un robot ?
Dans certaines applications, il peut être nécessaire de mesurer et de contrôler avec précision la force de préhension du robot afin d'augmenter la dextérité et de s'assurer que les objets fragiles ne soient pas écrasés par la poigne du robot (par exemple, la manipulation des plaquettes de semi-conducteurs). Bien que les cellules de charge soient des capteurs fiables pour la mesure de force, elles ont historiquement été limitées par leur construction encombrante.
Pour résoudre ce problème, FUTEK a conçu et développé un NanoCapteur. Sa géométrie miniature de 4 mm x 5 mm s'adapte à la majorité des applications de préhension de dispositifs d'extrémité sans sacrifier la fiabilité et la précision des cellules de charge standard. Grâce à son design léger, il offre une réponse à fréquence naturelle élevée, ce qui le rend adapté aux applications de changement rapide de force.
Les nanocapteurs de FUTEK sont personnalisés pour répondre à des solutions OEM spécifiques. Des capteurs COTS sont également disponibles pour la validation de concept et les applications de R&D à faible volume.
Avantages du NanoCapteur FUTEK :
- Non-linéarité de ±0,5% de la sortie nominale;
- Surcharge sécurisée jusqu'à 200% ;
- Capteurs personnalisés IP67 et autoclavables ;
- Capteur de force en tension-compression ;
- Très faible déflexion (0.005 mm) ;
- Réponse en fréquence naturelle élevée jusqu'à 98KHz;
- Dispositions de montage avec filetage M1 des deux cotés ;
- Instrumentation à compensation de charge latérale en pont complet d' 1kOhm (hors axe ou charges étrangères) ;
- Structure soudée au laser ;
Qu'est-ce qu'un capteur de force/couple six axes ?
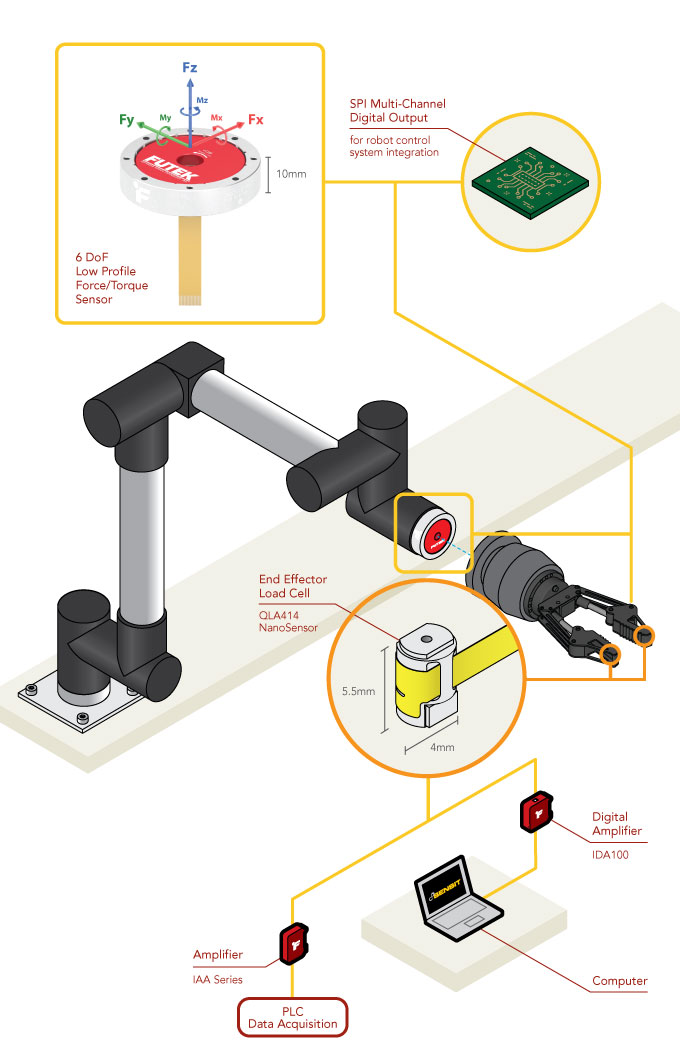
Un capteur 6 DoF est un dispositif utilisé pour assurer la précision dans les applications robotiques. Le capteur est conçu pour les articulations robotiques et il est généralement monté sur le "poignet" du bras du robot pour fournir des mesures de force précises pour les trois coordonnées géométriques (±Fx, ±Fy, ±Fz) et les moments ou couples autour de celles-ci (±Mx, ±My, ±Mz). Un capteur de force/couple à six axes est également connu sous le nom de capteur de force/couple multi-axes, cellule de charge multi-axes, capteur F/T ou cellule de charge à six axes.
Quelles applications nécessitent des mesures de force et de couple sur six axes ?
Les capteurs de force/couple sont utilisés pour les tests de produits, l'assemblage robotisé, le meulage, le polissage et d'autres applications industrielles où le maintien d'une position stable et d'une trajectoire à haute répétitivité est nécessaire. Ce capteur est particulièrement important dans les opérations d'assemblage complexes où le robot sera confronté à différents problèmes (désalignements, ajustements serrés, tests de force, etc.) et où le contrôle précis du mouvement sur la force appliquée par l'outil en bout de bras est primordial. La cellule de charge à six axes permet au contrôleur d'observer la situation et d'améliorer la dextérité du robot.
Dans l'industrie des dispositifs médicaux, les capteurs de force/couple travaillants sur six axes sont utilisés dans la chirurgie robotique, les instruments laparoscopiques haptiques et de nombreuses autres applications.
Le guidage manuel est une application où les lectures de couple sont nécessaires. Lorsque l'opérateur guide l'effecteur (outil du robot) pour lui assigner une trajectoire spécifique, il génère un couple dans l'outil du robot qui est ensuite lu par le capteur de force/couple à six axes. Ces couples multi-axes sont ensuite lus dans toutes les directions cartésiennes et le signal peut être envoyé à l'ordinateur pour analyse.
Comment ça marche ?
- Le Nanocapteur QLA414 est monté dans la pince de l'effecteur du robot. Il peut être entièrement personnalisé pour s'adapter aux applications de préhension uniques des OEM.
- Le Nanocapteur capte les forces de préhension générées par l'effecteur. Le signal de sortie du capteur est ensuite conditionné, amplifié et numérisé par la sortie numérique de la série USB, l'amplificateur IDA100 ou la sortie numérique SPI multicanaux QIA.
- Le signal de l'instrument est ensuite envoyé à l'automate programmable, au PC ou au contrôleur du bras robotique, fournissant un retour d'information de haute précision sur la force de préhension et permettant un système de contrôle en boucle fermée.
- De plus, avec l'IDA100, la sortie amplifiée du capteur peut être surveillée et les paramètres de l'amplificateur analogique peuvent être ajustés numériquement avec le logiciel SENSIT™ de FUTEK.
Produits utilisés
NanoCapteur QLA414 de haute précision à géométrie minuscule de 4 mm x 5 mm, associé à l'un des conditionneurs suivants :
- QIA125 - Sortie numérique SPI à faible puissance à 3 canaux ;
- QIA131 - Sortie numérique SPI haute résolution à 6 canaux ;
- Série USB - Circuit imprimé interne avec sortie numérique USB ;
- Amplificateurs analogiques de la série IAA.
Produits associés
QLA414: Nano Capteur de force en traction compression

Solution FUTEK USB220 pour capteur de force, couple, pression (entrée mV/V)

Solution FUTEK USB520 pour capteur de couple avec codeur incorporé - mesure de couple et angle / vitesse

IAA100 : Amplificateur conditionneur sortie tension pour capteur à jauge de contrainte.

IAA200 : Amplificateur Conditionneur sortie courant pour capteur à jauge de contrainte.

IAA300 : Amplificateur pour capteur à jauge - Sortie tension - Haute vitesse et résolution .

QMA142: Capteur miniature 6 axes de force Fx/Fy/Fz et de couple Mx/My/Mz
