Controle de couple d'un bras de robot articulé
.
Les armatures robotiques polyvalentes et adaptatives ont l'avantage d'augmenter la productivité de la fabrication en automatisant et en exécutant des tâches complexes et répétitives 24 heures sur 24 et 7 jours sur 7. Ces bras sont souvent conçus pour être entraînés ou opérer en équipe comme des robots coopératifs (cobot/co-robot). Ces bras sont pilotés par des servomoteurs ou des moteurs pas à pas. En plus de surveiller la position de l'arbre, ces bras doivent surveiller le couple de sortie pour assurer un mouvement régulier et stable. En combinant ces moteurs avec un capteur de couple de réaction, des boucles de contrôle peuvent être développées pour un fonctionnement régulier et autonome.
Nous personnalisons également des capteurs de couple à engrenages à ondes de déformation harmoniques de haute précision, intégrés et légers, pour la rétroaction en boucle fermée, avec une grande flexibilité au niveau de la géométrie et de la conception.
.
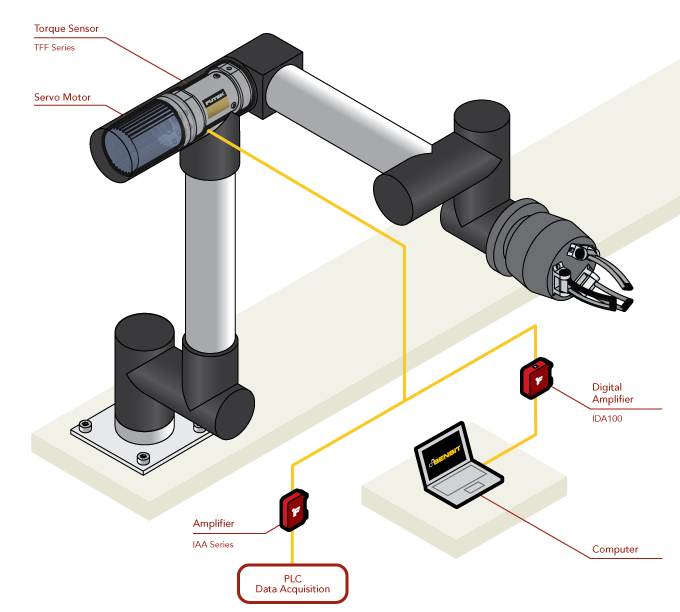
Fonctionnement :
- Un capteur de couple de la série TFF est monté entre le bras du servo robot et ses points de montages.
- Le capteur de couple mesure le couple délivré pendant le mouvement du bras qui est ensuite amplifié par l'amplificateur IAA ou IDA100.
- Le signal amplifié est alors envoyé à l'automate ou au contrôleur du bras robotisé, fournissant un retour précis et fermant la boucle de commande.
- De plus, avec l'IDA100, la sortie amplifiée du capteur peut être surveillée et les réglages analogiques de l'amplificateur peuvent être configurés numériquement avec le logiciel SENSIT.
.
Produits utilisés :
Un capteur de couple de réaction FUTEK de la série TFF avec centre de trou traversant associé à des amplificateurs FUTEK (série IAA ou IDA100).
Produits associés
TDD400 : Capteur de couple statique miniature de 0.04 à 60 Nm

TFF425 -- TFF750 : Capteur de couple statique fixation par flasques de 0.04 Nm à 33900 Nm

TFF325 : Capteur de couple statique miniature de 0.15 à 12 Nm

TFF400 : Capteur de couple statique miniature de 0.04 Nm à 60 Nm

SMTR : Capteur de couple statique de +/-5 à 1000 Nm

TSS400 : Capteur de couple statique à entraînements rond de +/-0.04 à 60 Nm

IAA100 : Amplificateur conditionneur sortie tension pour capteur à jauge de contrainte.

IAA200 : Amplificateur Conditionneur sortie courant pour capteur à jauge de contrainte.

IAA300 : Amplificateur pour capteur à jauge - Sortie tension - Haute vitesse et résolution .

SMRX : Capteur de couple statique fixation par flasques de +/-50 Nm à +/-5000 Nm
