Capteur de couple à engrenage harmonique à onde de contrainte
.
Dans les applications de bras robotisés qui nécessitent une précision et un contrôle élevés, comme la robotique chirurgicale, les ingénieurs peuvent utiliser un engrenage à ondes de déformation (ou un entraînement harmonique à ondes de déformation) pour améliorer les performances du robot.
.
Avantages de l'engrenage à ondes de déformation dans les applications de bras robotique :
- Réduit l'inertie du bras du robot et améliore les performances dynamiques grâce à une accélération et un temps de stabilisation plus rapides.
- Offre des rapports de réduction élevés en une étape pour un contrecoup très faible,
- Augmente la capacité de charge utile et réduit les besoins en énergie
L'équipe d'ingénierie de couple de FUTEK possède une grande expertise dans la personnalisation des capteurs de couple à engrenages harmoniques à ondes de contrainte, de faible hauteur et de haute précision, pour toute application robotique utilisant la technologie des engrenages à ondes de contrainte.
.
Avantages des capteurs de couple à engrenage harmonique à ondes de contrainte dans les applications de bras robotique :
- Prise en charge du contrôle du mouvement avec une faible consommation d'énergie
- Poids léger, profil bas et haute précision pour une rétroaction en boucle fermée.
- Grande flexibilité dans la géométrie et la conception
- Peut être placé sur les articulations du bras robotique, ce qui réduit le moment d'inertie global, ainsi que la consommation d'énergie globale du bras robotique.
.
Une alternative aux capteurs à six degrés de liberté.
Les capteurs d'engrenage harmonique à ondes de contrainte ont également des capacités uniques qui en font une solution alternative aux capteurs à six degrés de liberté (6 DOF) pour certains types d'applications de bras robotique de haute précision, comme la chirurgie robotique mini-invasive.
Par exemple, pendant certaines procédures de chirurgie laparoscopique, les chirurgiens doivent maintenir la position de l'effecteur final (l'instrument à l'intérieur de la cavité abdominale) pendant que le bras robotique se déplace. Cette manœuvre est difficile à réaliser avec des capteurs 6 DOF uniquement, car il faut mesurer le couple de chaque articulation afin de calculer correctement la direction et l'amplitude de la force équivalente en fonction de la sortie du couple de chaque articulation.
.
Autres avantages de l'utilisation du capteur d'engrenage harmonique à ondes de déformation comme alternative aux capteurs à 6 DOF :
- Moins coûteux à mettre en œuvre car la mesure du couple peut être mise en œuvre uniquement pour certaines articulations sélectionnées.
- Un seul canal par articulation permet de réduire considérablement la courbe d'apprentissage et les autres coûts de mise en œuvre.
- Maintenance moins coûteuse et entretien plus facile, car un capteur peut être entretenu ou remplacé sans avoir à démonter le reste des capteurs.
- La diaphonie habituelle de la solution 6 DOF est pratiquement éliminée.
- Flexibilité sur la géométrie personnalisée pour l'électronique embarquée (analogique, SPI, etc.).
- Flexibilité de l'électronique pour intégrer la détection des défauts et ajouter de la redondance.
- Légèreté - Chaque capteur de couple de jointure pèse environ 30 grammes (câbles compris), contre ~400 grammes pour les capteurs F/T traditionnels.
- Stabilité à haute température
- Excellentes caractéristiques de linéarité et de répétabilité
- Plus de données disponibles, meilleure résolution grâce à des capteurs séparés à chaque articulation.
- Grande ouverture/trou - plus simple pour faire passer le câblage et les outils.
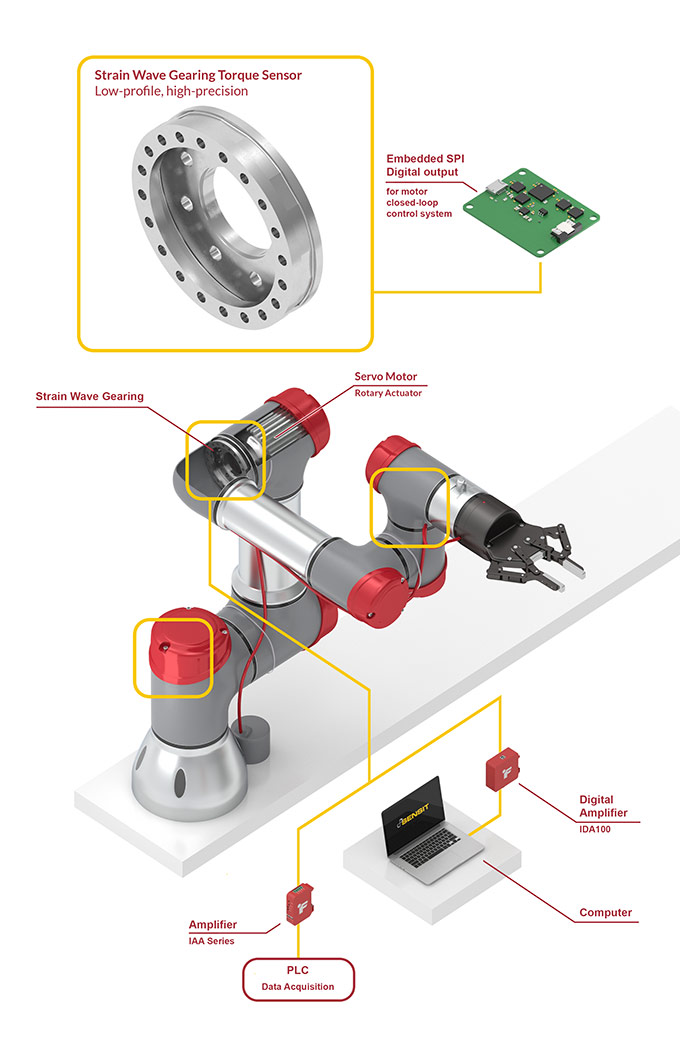
Comment ça marche ?
- Le capteur de couple est monté entre l'engrenage à ondes de contrainte du bras du robot et ses points de fixation.
- Le capteur mesure le couple produit pendant le mouvement du bras, qui est ensuite amplifié par la série IAA, le conditionneur série IDA100 ou la sortie numérique SPI multicanaux QIA.
- Le signal amplifié est ensuite envoyé à l'automate ou au contrôleur du bras robotique, fournissant un retour de couple de haute précision et permettant un système de contrôle en boucle fermée.
- De plus, grâce à l'IDA100, la sortie amplifiée du capteur peut être surveillée et les paramètres de l'amplificateur analogique peuvent être ajustés numériquement avec le logiciel SENSIT™ de FUTEK.
.
Produits utilisés
Capteurs de couple de transmission à ondes de contraintes, légers, peu encombrants et de haute précision, associés aux amplificateurs analogiques de la série IAA, au conditionneur de signal IDA100 ou à la sortie numérique SPI multicanaux QIA.
Produits associés
QTA141: Capteur de couple statique miniature à micro réaction

QTA143: Capteur de couple statique miniature sur mesure

IAA100 : Amplificateur conditionneur sortie tension pour capteur à jauge de contrainte.

IAA200 : Amplificateur Conditionneur sortie courant pour capteur à jauge de contrainte.

IAA300 : Amplificateur pour capteur à jauge - Sortie tension - Haute vitesse et résolution .
